final video:

dinsdag 29 mei 2012
vrijdag 25 mei 2012
dinsdag 22 mei 2012

opbouw:
nog enkele foto's die de verschillende stappen een beetje tonen.
om de behuizing te maken hebben we een mal gemaakt en dit gebruikt in de thermoformer.

het schildpadmotief is met plakband afgedekt

alles is groen gespoten

de poten zijn ook in het sterkere schuim gemaakt

eens de verf droog is kan de plakband weg genomen worden


het resultaat van de spuitwerken



rockets make him go faster XD

snelheidsregelaar

een riempje om de raket vast te houden



schuim moet het schild op de elektronica plaatsen

een stylisch zonnebril die met een elastiekje rond het hoofd vast hangt



het klemsysteem van de shell

donderdag 17 mei 2012
Shell en body
dit zijn de foto's van de bouw van het platform voor de electronica en de shell van de schildpad.










een prototype in zacht "recticel" schuim om de afmetingen en vorm makkelijk te kunnen bepalen

de mal voor het thermoforming proces wordt uit het sterkere groene PU schuim gemaakt zodat de mal herbruikbaar kan worden.
zondag 13 mei 2012
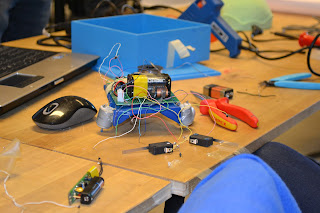
de electronica:
nu de electronica werkt (na enkele aanpassingen) moet deze op een platform geplaatst worden om mobiel te worden. na verschillende pogingen werd ontdekt dat de motoren niet genoeg kracht hebben om een wiel te draaien, daarom wordt de techniek van de "beetlebot " gebruikt. hierbij worden de motoren schuin geplaatst en rijden ze op de motorasjes.
eerste test op een ander platform:
(op het filmpje doet hij enkel een lange draai)








eerste test op een ander platform:
(op het filmpje doet hij enkel een lange draai)








donderdag 10 mei 2012
Arduino code:
dit is de code die ik momenteel gebruik om de robot aan te sturen, de muziek die het robotje zal maken als hij water aanraakt moet nog gecodeerd worden.
de drawdio zal het signaal geven om de muziek code te starten en misschien ook op een bepaalde manier beinvloeden
/* initial pin declaration
the value doesn't change during the loop but is used for name only */
int analogInPin = A0;
int analogOutPin = 11;
int analogOutPin2 = 5;
int drawdiopin=A1;
int speakerpin=3;
int turnswitchrechts=2;
int turnswitchlinks=0;
/* initial value declaration
these are the values that change state or value in the program*/
int sensorValue = 0;
int outputValue = 0;
int buttonStatelinks = 0;
int buttonStaterechts = 0;
int thisPitch = 0;
void setup() {
/* assigning pin modes*/
Serial.begin(9600);
pinMode(turnswitchrechts,INPUT);
pinMode(turnswitchlinks,INPUT);
pinMode(analogOutPin,OUTPUT);
pinMode(analogOutPin2,OUTPUT);
}
void loop() {
/* side collision sensors*/
buttonStatelinks = digitalRead(0);
buttonStaterechts = digitalRead(2);
/*controlling the max speed with a potentiometer*/
sensorValue = analogRead(analogInPin);
outputValue = map(sensorValue, 0, 1023, 0, 255 );
/* mapping out the drawdio to control the sound made from the speaker
music control still needs to be made*/
/* random path followed by the robot*/
analogWrite(analogOutPin, random(40,outputValue));
analogWrite(analogOutPin2, random(40,outputValue));
delay(random(10,5000));
}
woensdag 9 mei 2012
the electronics:

de motor sturing: enkele componenten

test code voor 1 motor

testen 2 motoren



uitbreiden schema

printplaatje solderen



diy arduino 9v voeding


testen nieuwe transistoren



de kleine transistors (p2n2222a) worden veel te warm en laten een te kleine stroom door waardoor de motoren minder kracht hebben.
ik heb dit opgelost met 2 TIP 41A transistoren



the result of a lot of testing:
CHAOS!!

Abonneren op:
Reacties (Atom)